
MPU6050 GY-521 V2 Unsoldered IMU Accelerometer & Gyroscope Sensor for Arduino
SKU JT-PJUN-WMMQ
Single unsoldered MPU6050 GY-521 V2 6-axis IMU for motion, tilt, and rotation tracking over I2C.
Bulk eligible
Mix any Bulk eligible products — discount applies to your total quantity across the cart.| Buy 5+ | $6.65 each | Save 5% |
| Buy 10+ | $6.30 each | Save 10% |
- Free Ground Shipping U.S. orders $35+
- Ships from USA Domestic fulfillment
- 30-day returns Free defect replacement
- 7-day support Fast email replies
 MPU6050 GY-521 V2 Unsoldered IMU Accelerometer & Gyroscope Sensor for Arduino
★★★★★
(4)
$6.99
This item
MPU6050 GY-521 V2 Unsoldered IMU Accelerometer & Gyroscope Sensor for Arduino
★★★★★
(4)
$6.99
This item


Products related to this item
Overview
Product Overview
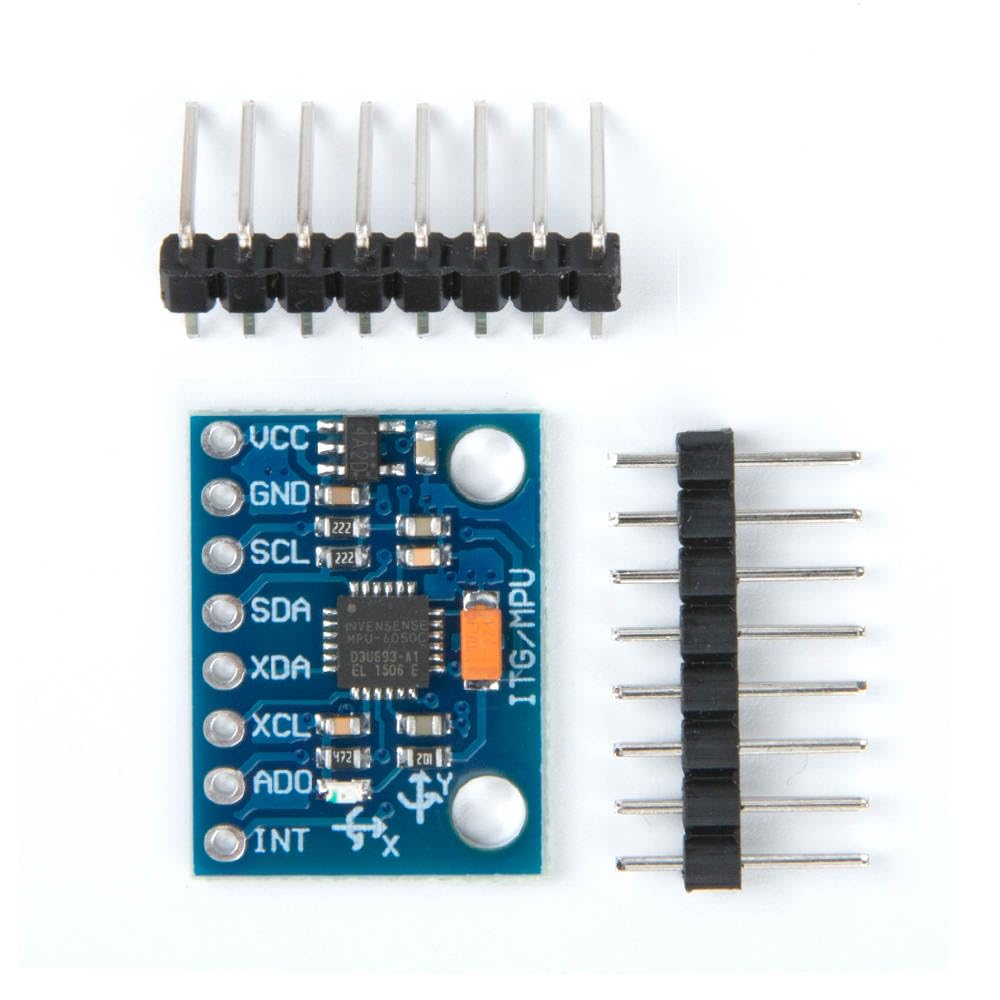
The ShillehTek MPU6050 GY-521 V2 (unsoldered, single piece) is a compact 6-axis IMU that combines a 3-axis accelerometer and 3-axis gyroscope to measure motion, tilt, and rotation in real time for Arduino and other microcontroller projects. It uses I2C, so it is easy to wire and supported by tons of example code and libraries. Since this version is unsoldered, it is perfect if you want a clean custom build, plan to solder your own header pins, or are integrating the module directly into a prototype or PCB.
Questions & answers
Frequently asked questions
Have other questions?
Chat with our US-based team — we usually reply fast.
What's included
Features & Specs
Reference
Documents
Full Product Manual MPU6050 Accelerometer 6DOF - Raspberry Pi, Arduino, ESP32 I2C Accelerometer In-depth setup guide with wiring, code examples, and troubleshooting.Learn
Related Tutorials

MPU6050 MEMS Sensor: How Accel and Gyro Work

Raspberry Pi MPU6050: Smooth Sensor Data in MicroPython

MPU6050 ToxicLibs: Fix Processing Teapot Imports

Raspberry Pi 4 MPU6050: Read Motion Data in Python

STM32 Blue Pill MPU6050: Read data and calibrate gyro

Arduino Nano MPU6050: Stream Accel and Gyro Data

Arduino NEO-6M GPS: Read Lat/Long in Serial

Arduino Nano MPU9250 IMU: Stream 9-Axis Data

Arduino Nano NEO-6M GPS: OLED Speedometer Display

Arduino Nano MPU6050 + NEO-6M: Log GPS + IMU to SD
Watch
Related Videos
Verified buyers
Customer Reviews
MPU6050 GY-521 V2 Unsoldered IMU Accelerometer & Gyroscope Sensor for Arduino